Design of a controller cooperating with the EATON controller via the CAN bus. The scope of work included the design of the schematic and printed circuit board as well as writing software for the microcontroller. See more >>
Ilizarov controller
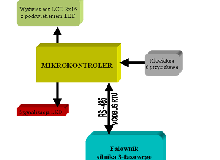
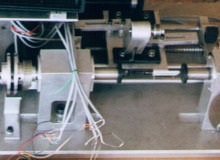
Designing a diagram and a printed circuit board of the controller controlling the operation of the Ilizarov apparatus. The mechatronic Ilizarov apparatus is driven by 3 stepper motors. See more >>
Inverter controller
Design of a controller that controls the production cycle through communication with the inverter from which the drive motor is powered. The controller communicates with the inverter via the MODBUS RTU protocol. See more >>
RS232-RS485 converter
A converter of the ASCII protocol to the MODBUS RTU protocol was made. Additionally, a hardware converter of the RS232 to RS485 interface was made. The program was written in C. See more >>
Scales modernization
The electronic scale was modernized to wirelessly transmit data to a PC. Additionally, the scale is battery-powered. See more >>
Radio control
Radio control is used to wirelessly control the rotational speed of stepper motors. As part of the project, a hardware design of the system was made and a control program was written in C. See more >>
Automation
Winder controller
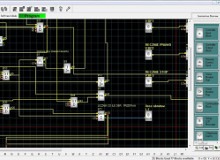
Design and implementation of the winder control. The control unit is the SU 1.2 controller. The spindle and feed are driven by stepper motors. The winder operation algorithm was implemented in C. See more >>
Aquarium controller
The SU 1.5 controller was used to control the parameters of the freshwater aquarium. The third PT100 temperature sensor was connected to the controller via a module with the MODBUS RTU protocol. See more >>
Cookie machine
Design and implementation of automation for a MULTIDROP machine – a machine producing cookies. Electrical diagrams were developed, the PLC controller, touch panel and inverters were programmed. See more >>
Tribometer
Design and implementation of automation for a MULTIDROP machine – a machine producing cookies. Electrical diagrams were developed, the PLC controller, touch panel and inverters were programmed. See more >>
Mixer cart control
Automation of the process of dosing and mixing paints and varnishes. The system consists of trolleys that constitute a mobile mixer system. See more >>
Recuperator controller
The purpose of the implementation was to control the operation of the recuperator. For this purpose, the SU 1.5 driver was used, which supports appropriate input/output devices. The recuperator operation algorithm was implemented in C. See more >>
Feeder and guillotine controller
Design and implementation of automation that controls the operation of the feeder and guillotine. The feeder and guillotine are driven by three stepper motors. To make it easier to load the feeder, its upper part is lifted by an actuator. See more >>
Line modernization
Modernization of the line drive control. Modification of the visualization on the control panel, adding a potentiometer for speed regulation and sound and light signaling. Program changes in the PLC controller. See more >>
Software
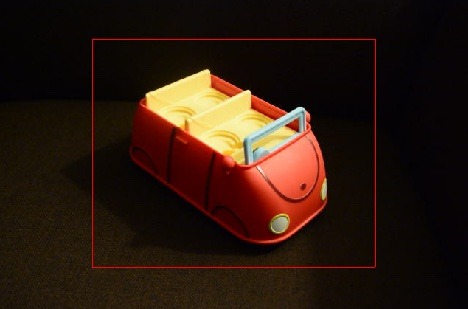
Application for taking 3D photos
The purpose of the application was to support photo sessions for product photography. The program supports a rotary table that allows you to photograph an object in a full 360 degrees on the horizontal axis, and a table arm that moves from 0 to 90 degrees on the vertical axis. See more >>